



Динамометри калипери тормозҳои мотосикл
Ариза:
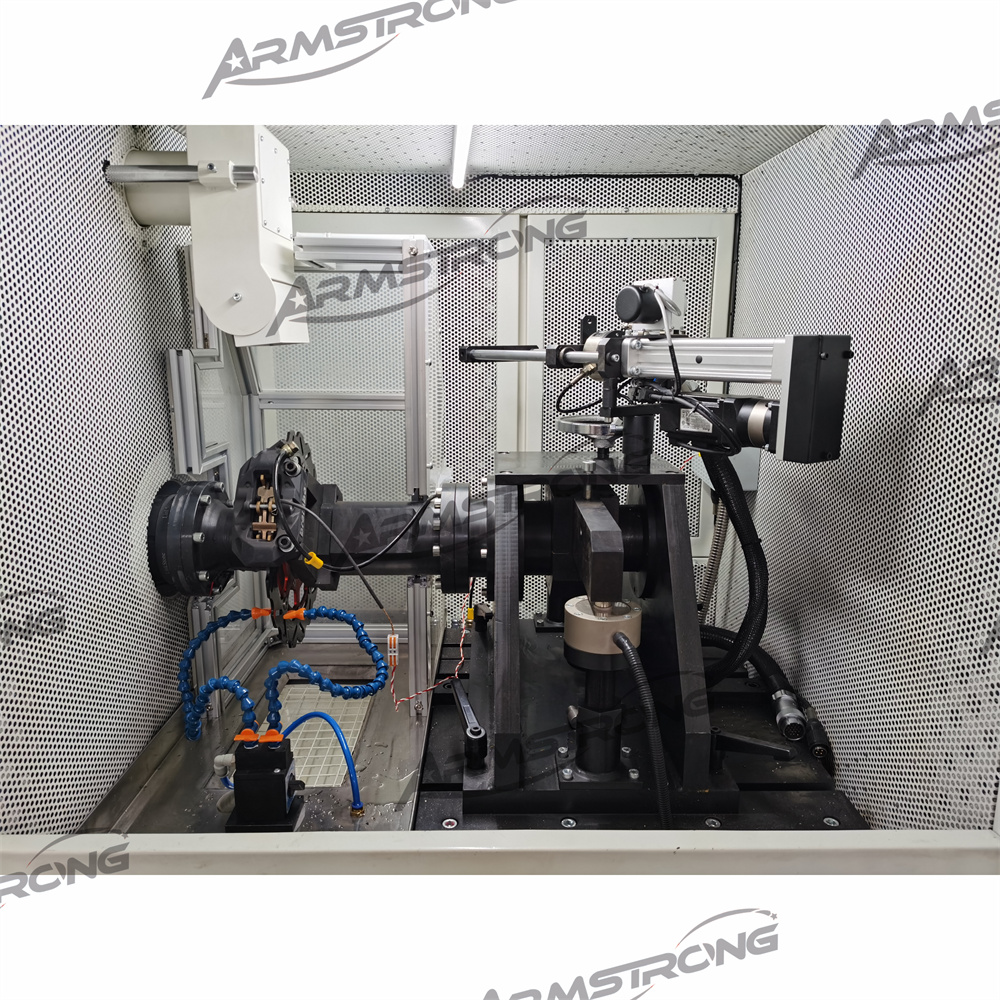
Дар соҳаи тарроҳӣ ва истеҳсоли мотосикл, кори системаи тормоз мустақиман бо бехатарии шахсии ронанда алоқаманд аст. Усулҳои анъанавии санҷиши тормоз маҳдудиятҳои зиёд доранд, аммо пайдоиши мизҳои санҷиши инерсияи симулятсияи электрикӣ тағйироти инқилобӣ дар таҳия ва озмоиши тормозҳои мотосикл ба бор овард. Ин динамометр махсусан барои болишти тормоз ва пойафзоли тормозҳои мотосикл тарҳрезӣ шудааст, то кори тормоз ва арзиши садоро ҳангоми тормоз дар ҳолати воқеӣ санҷад.
Тафсилоти маҳсулот:
Динамометри калипери тормози мотосикл як таҷҳизоти озмоишии баландсифат аст, ки инерсияи механикии анъанавиро тавассути симулятсияи электрикӣ иваз мекунад. Вазифаҳои асосии он дар ҷанбаҳои зерин инъикос ёфтаанд:
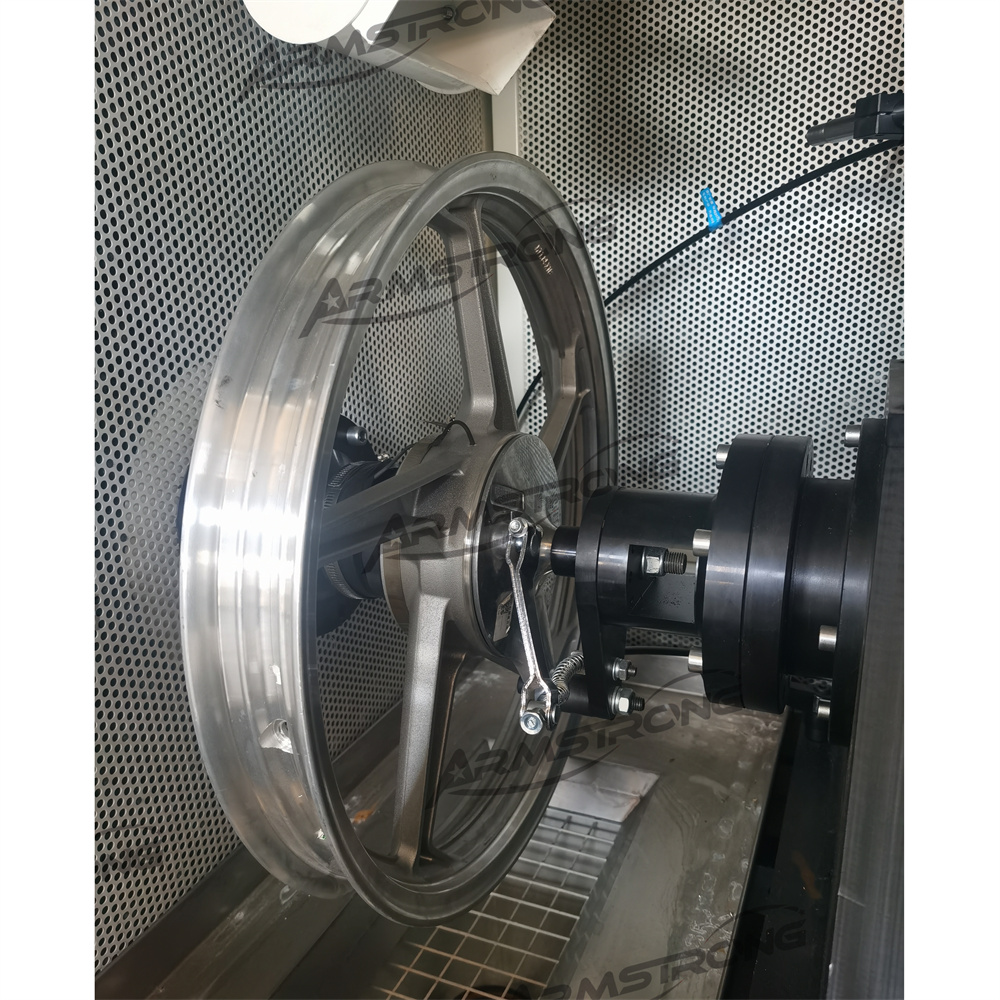
●Моделсозии дақиқи шароити воқеии корӣ: қобилияти такрори дақиқи хусусиятҳои инерсияи мотосиклҳо дар суръатҳои гуногун, аз ҷумла шароити тормозкунӣ дар шароити гуногуни суръат.
●Арзёбии ҳамаҷонибаи самаранокӣ: Он метавонад нишондиҳандаҳои калидӣ, аз қабили моменти тормозкунӣ, масофаи тормозкунӣ, устувории тормозкунӣ ва самаранокии пастшавии ҳароратӣ-термикии тормозро санҷад.
●Санҷиши устуворӣ: Тағйироти кори тормозро дар шароити истифодаи дарозмуддат барои арзёбии мӯҳлати хизмати маҳсулот тақлид кунед.
●Санҷиши ҳолати шадид: самаранокии тормозро дар муҳитҳои шадид ба монанди роҳҳои тар ва лағжанда, ҳарорати баланд ва ҳарорати паст бехатар тақлид кунед.
●Дастгирии тадқиқот ва рушд: Барои тарҳрезии маводҳои нави тормоз ва сохторҳои тормоз дастгирии боэътимоди маълумоти таҷрибавӣ пешниҳод кунед.
Принсипҳои техникӣ ва таркиби система:
●Стансияи озмоишии симулятсияи инерсияи электрикӣ технологияи пешрафтаи электроникаи барқӣ ва алгоритмҳои дақиқи идоракуниро барои тақлид кардани инерсияи чархҳои маховикии анъанавӣ истифода мебарад:
●Системаи симулятсияи инерсияи электрикӣ: Бо назорати дақиқи моменти муҳаррик, ҳисобкунии вақти воқеӣ ва симулятсияи хусусиятҳои динамикӣ дар зери инерсияи гуногун.
●Муҳаррики вокуниши баланди динамикӣ: бо истифода аз системаи муҳаррики серво ё муҳаррики басомади тағйирёбанда барои таъмини вокуниши зуди моменти барқ.
●Системаи ҷамъоварии маълумот: сенсорҳои дақиқи баланд параметрҳои вақти воқеиро, аз қабили қувваи тормозкунӣ, суръат, ҳарорат ва ғайраро назорат мекунанд.
●Системаи идоракунӣ: Системаи идоракунии ҳалқаи пӯшида, ки бар асоси алгоритмҳои пешрафта барои таъмини дақиқии раванди санҷиш асос ёфтааст.
Бартариҳо:
2.1 Танзими беқадам: Инерсияи санҷишро метавон худсарона дар доираи ҳадди аксар инерсия муқаррар кард, бе ниёз ба танзими механикӣ. Як дастгоҳ метавонад тамоми доираи талаботи санҷишро, аз мотосиклҳои сабук то вазнин, фаро гирад.
2.2 Беҳбуди инқилобӣ дар самаранокии санҷиш: вақти таҷҳизоти анъанавиро барои суръат бахшидан ба чархи маховик аз байн мебарад, давраи санҷишро беш аз 60% кӯтоҳ мекунад ва самаранокии тадқиқот ва санҷиши сифатро ба таври назаррас беҳтар мекунад.
2.3 Санҷиши интеллектуалӣ: ҳамгироии нармафзори пешрафтаи санҷиш, дастгирии равандҳои автоматии санҷиш, таҳлили интеллектуалии маълумот, тавлиди худкори гузоришҳо ва дигар вазифаҳо.
2.4 Бехатар ва боэътимод: Пешгирӣ аз хатарҳои бехатарии чархҳои чархзанандаи баландсуръат, раванди санҷиш комилан идорашаванда аст.
2.5 Миқёспазирии қавӣ: Функсияҳои санҷишро метавон тавассути навсозии нармафзор барои мутобиқ шудан ба стандартҳо ва талаботи нави санҷиш дар оянда илова кард.
2.6 Ҳама қисмҳо бренди машҳурро қабул мекунанд, масалан, муҳаррики ACC ва воҳиди фикру мулоҳизаҳои IPC Energy, дурустии натиҷаи санҷишро таъмин мекунанд.
2.7 Метавонад ҳам кори болишти тормоз ва ҳам маҳсулоти пойафзоли тормозро санҷад.
Санҷиши тормози диск
Санҷиши тормози барабан
- Параметрҳои техникии қисман:
| Параметрҳои асосии техникӣ | |
| Қувваи муҳаррик | Мотор бо суръати идоракунии басомади тағйирёбандаи сефазаи AC 30Kw |
| Суръати меҳвари асосӣ | 5-2000 чархзанӣ дар як дақиқа |
| Инерсияи озмоишӣ | 25кгм² (инерсияи механикӣ) ±5кгм² (симулятсияи барқӣ) |
| Моменти максималии корӣ | ≤1000Н.м |
| Фишори тормоз | ≤ 160бар |
| Моменти доимӣ | 50-600Н.м |
| Андозагирии ҳарорат | ҳарорати хонагӣ ~1000℃ |
| Системаи хунуккунӣ | суръати шамол ≤10м/с (танзимоти симулятсияшуда) |
| Системаи компютерӣ | Компютери идоракунии саноатии Siemens Дисплейи LCD-и саноатии 19-дюйма Принтери рангаи А4 |
| Вазифаҳои мошин | |
| 1 | Функсияи симулятсияи инерсияи электрикӣ |
| 2 | Функсияи санҷиши садои тормоз |
| 3 | Функсияи санҷиш бо моменти доимӣ (баромади доимӣ) |
| 4 | Функсияи санҷиш бо фишори доимӣ (вуруди доимӣ) |
| 5 | Функсияи симулятсияи суръати ҳавои хунук |
| 6 | Функсияи санҷиши самаранокии тормозкунӣ |
| 7 | Функсияи санҷиши пӯсидашавии ҳарорати баланд + барқароршавӣ |
| 8 | Функсияи санҷиши таназзули об + барқароршавӣ |
| 9 | Назорати ҳамаҷонибаи компютерӣ, санҷиш, чопи каҷҳо ва гузоришҳо |
| 10 | Нармафзор пурра барномарезӣшаванда аст ва метавонад стандартҳои санҷиширо аз Чин, Аврупо, Иёлоти Муттаҳида, Ҷопон ва дигар кишварҳо иҷро кунад. |





