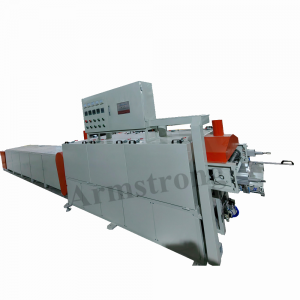
Auto piduriklotside dünamomeeter – tüüp B
Rakendus:
Pidur on auto ohutu juhtimise üks olulisi komponente ning selle jõudlusel on märkimisväärne mõju auto sõiduohutusele ja võimsusele. Tavaliselt testitakse pidurite jõudlust vastavalt autoriteetsete institutsioonide kehtestatud katsestandarditele. Üldised katsemeetodid hõlmavad väikese valimiga katsetamist ja inertsiaalkatsetamist. Väikese valimiga katseid kasutatakse pidurite mõõtmete ja kuju simuleerimiseks, mille tulemuseks on madal täpsus, kuid suhteliselt madalad kulud. Neid kasutatakse tavaliselt hõõrdematerjalide klassifitseerimiseks, kvaliteedikontrolliks ja uute toodete arendamiseks.
Piduridünamomeeter on pidurite kvaliteedikontrolli kõige autoriteetsem test, mis suudab tõeliselt kajastada piduri tööomadusi ja on järk-järgult muutunud pidurite kvaliteedikontrolli peavooluks. Sellega saab testida pidurisüsteeme kontrollitud keskkonnas, mis peegeldab tegelikku maailma.
Autopidurite dünamomeetrikatse on autode pidurdusprotsessi simulatsioon, mille käigus testitakse pidurdustõhusust, termilist stabiilsust, hõõrdkatete kulumist ja pidurite tugevust stendikatsete abil. Praegu maailmas on universaalne meetod pidurikomplekti pidurdustingimuste simuleerimine mehaanilise inertsi või elektrilise inertsi abil, et testida selle erinevat jõudlust. See jagatud tüüpi dünamomeeter on mõeldud sõiduautode pidurite testimiseks.
Eelised:
1.1 Peremees on testplatvormist eraldatud, et minimeerida peremehe vibratsiooni ja müra mõju testile.
1.2 Hooratas on paigutatud peavõlli koonilise pinnaga, mis on mugav lahtivõtmiseks ja stabiilseks tööks.
1.3 Pingil on piduri peasilindri juhtimiseks servomootoriga elektriline silinder. Süsteem töötab stabiilselt ja usaldusväärselt ning rõhu reguleerimise täpsus on kõrge.
1.4 Pingi tarkvara suudab täita mitmesuguseid olemasolevaid standardeid ja on ergonoomiliselt sõbralik. Kasutajad saavad ise testimisprogramme koostada. Spetsiaalne müratesti süsteem saab töötada iseseisvalt, ilma põhiprogrammile toetumata, mis on haldamiseks mugav.
1.5 Täidetavad testimisstandardid: AK-Master, SAE J2522, ECE R90, JASO C406, ISO 26867, GB-T34007-2017 test ja nii edasi.
Toote üksikasjad


| Peamised tehnilised parameetrid | |
| Peamasin | Jagatud struktuur, põhikorpus ja katseplatvorm on eraldatud |
| Mootori võimsus | 200 kW (ABB) |
| Mootori tüüp | Vahelduvvoolu sageduse kiiruse reguleerimise mootor, sõltumatu õhkjahutusega |
| Kiirusvahemik | 0–2000 p/min |
| Konstantse pöördemomendi vahemik | 0 kuni 990 p/min |
| Püsiv võimsusvahemik | 991 kuni 2000 p/min |
| Kiiruse reguleerimise täpsus | ± 0,2% täisvärtuse |
| Kiiruse mõõtmise täpsus | ± 0,1% täisvärtuse |
| Ülekoormusvõime | 150% |
| Mootori kiiruse regulaator | ABB 880 seeria, võimsus: 200 kW, ainulaadne DTC juhtimistehnoloogia |
| Inertsisüsteem | |
| Katsepingi vundamendi inertsi | Umbes 10 kg2 |
| Min. mehaaniline inerts | Umbes 10 kg2 |
| Dünaamiline inertsiaalne hooratas | 80 kg/m2* 2+50 kg2* 1 = 210 kg/m2 |
| Maksimaalne mehaaniline inerts | 220 kg/m2 |
| Maksimaalne elektriline analooginerts | 40 kg2 |
| Analoogne inertsivahemik | 10–260 kg/m² |
| Analoogjuhtimise täpsus | Maksimaalne viga ±1 gm² |
| |
| Maksimaalne pidurdusrõhk | 20MPa |
| Maksimaalne rõhu tõusukiirus | 1600 baari sekundis |
| Rõhu juhtimise lineaarsus | < 0,25% |
| Dünaamiline rõhu reguleerimine | Võimaldab programmeeritava dünaamilise rõhu juhtimise sisestamist |
| Pidurdusmoment | |
| Liuglaud on varustatud koormusanduriga pöördemomendi mõõtmiseks ja kogu ulatusega | 5000 Nm |
| Mõõtmise täpsus | ±0,1% täisringist |
| |
| Mõõtevahemik | 0 ~ 1000 ℃ |
| Mõõtmise täpsus | ± 1% täislaiusest |
| Hüvitise rea tüüp | K-tüüpi termopaar |
| Pöörlev kanal | Läbipääs kollektorrõngast 2 |
| Mittepöörlev kanal | Ring 4 |
Osalised tehnilised parameetrid