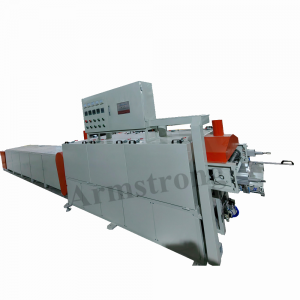
Dynamometer Pad Brake Kaʻa - ʻAno B
Noi:
ʻO ka paleki kekahi o nā ʻāpana koʻikoʻi no ka hoʻokele palekana ʻana o kahi kaʻa, a he hopena koʻikoʻi kāna hana i ka palekana o ka hoʻokele a me ka hana mana o ke kaʻa. ʻO ka maʻamau, hoʻāʻo ʻia ka hana paleki e like me nā kūlana hoʻāʻo i hoʻonohonoho ʻia e nā ʻoihana mana. ʻO nā ʻano hoʻāʻo maʻamau e komo pū me ka hoʻāʻo laʻana liʻiliʻi a me ka hoʻāʻo ʻana i ka papa inertial. Hoʻohana ʻia nā hoʻāʻo laʻana liʻiliʻi e hoʻohālike i nā ana a me nā ʻano o ka paleki, e hopena ana i ka pololei haʻahaʻa akā ʻoi aku ka haʻahaʻa o ke kumukūʻai. Hoʻohana pinepine ʻia lākou no ka hoʻokaʻawale ʻana i nā mea friction, ka kaohi maikaʻi, a me ka hoʻomohala ʻana i nā huahana hou.
ʻO ka brake dynamometer ka hoʻāʻo koʻikoʻi loa i ka nānā ʻana i ka maikaʻi o ka brake, hiki ke hōʻike maoli i nā ʻano hana o ka brake a ua lilo mālie i mea nui o ka nānā ʻana i ka maikaʻi o ka brake. Hiki iā ia ke hoʻāʻo i nā ʻōnaehana brake i loko o kahi ʻano i kāohi ʻia e hōʻike ana i ke ao maoli.
ʻO ka hoʻāʻo Dynamometer o nā paleki kaʻa he hoʻohālike ia o ke kaʻina hana paleki o nā kaʻa, kahi e hoʻāʻo ai i ka pono o ka paleki ʻana, ke kūpaʻa wela, ka ʻaʻahu o ka lining, a me ka ikaika o nā paleki ma o nā hoʻāʻo bench. ʻO ke ʻano hana honua o kēia manawa ma ka honua, ʻo ia ke hoʻohālike i nā kūlana paleki o kahi hui paleki me ka hoʻohana ʻana i ka inertia mechanical a i ʻole ka inertia uila, i mea e hoʻāʻo ai i kāna hana like ʻole. Ua hoʻolālā ʻia kēia dynamometer ʻano māhele no ka hoʻāʻo paleki o nā kaʻa ohua.
Nā Pōmaikaʻi:
1.1 Ua hoʻokaʻawale ʻia ka mea hoʻokipa mai ka paepae hoʻāʻo e hōʻemi i ka hopena o ka haʻalulu a me ka walaʻau o ka mea hoʻokipa ma ka hoʻāʻo.
1.2 Hoʻonoho ʻia ka flywheel me ka ʻili conical o ke koʻokoʻo nui, kahi kūpono no ka wehe ʻana a me ka hana paʻa.
1.3 Hoʻohana ka noho i ka cylinder uila servo e hoʻokele i ka cylinder master brake. Hana paʻa a hilinaʻi hoʻi ka ʻōnaehana me ka pololei o ke kaohi kaomi kiʻekiʻe.
1.4 Hiki i ka polokalamu noho ke hoʻokō i nā kūlana like ʻole, a he ergonomically friendly. Hiki i nā mea hoʻohana ke hōʻuluʻulu i nā polokalamu hoʻāʻo iā lākou iho. Hiki i ka ʻōnaehana hoʻāʻo walaʻau kūikawā ke holo kūʻokoʻa me ka hilinaʻi ʻole i ka polokalamu nui, kahi mea kūpono no ka hoʻokele.
1.5 Nā kūlana hoʻāʻo hiki ke hoʻokō ʻia: AK-Master, SAE J2522, ECE R90, JASO C406, ISO 26867, hoʻāʻo GB-T34007-2017 a pēlā aku.
Nā kikoʻī huahana


| Nā palena loea nui | |
| ʻenekini nui | Ua hoʻokaʻawale ʻia ke ʻano māhele ʻia, ke kino nui a me ke kahua hoʻāʻo |
| Mana mīkini | 200 KW (ABB) |
| ʻAno motika | Motika hoʻoponopono wikiwiki alapine AC, kūʻokoʻa ea-anuanu |
| Ka laulā wikiwiki | 0 - 2000 rpm |
| Ka laulā torque mau | 0 a i 990 rpm |
| Pae mana mau | 991 a i 2000 rpm |
| Ka pololei o ka hoʻokele wikiwiki | ± 0.2%FS |
| Pololei o ke ana ʻana o ka wikiwiki | ± 0.1%FS |
| Ka mana hoʻouka nui | 150% |
| Mea hoʻokele wikiwiki o ka motika | ʻO ABB 880 series, mana: 200KW, ʻenehana hoʻokele DTC kū hoʻokahi |
| ʻŌnaehana inertia | |
| Ka inertia kumu hoʻāʻo | Ma kahi o 10 kgm2 |
| Ka liʻiliʻi o ka inertia mīkini | Ma kahi o 10 kgm2 |
| ʻO ka huila lele inertia hoʻololi | 80 kgm2* 2+50kgm2* 1 = 210kgm2 |
| Max. ʻO ka inertia mīkini | 220 kgm2 |
| Max. ʻO ka inertia analog uila | 40 kgm2 |
| Ka laulā inertia analog | 10-260 kgm² |
| Ka pololei o ka mana analog | Ka nui o ka hewa ±1gm² |
| |
| Kaomi paleki kiʻekiʻe loa | 20MPa |
| Ka piʻi ʻana o ke kaomi kiʻekiʻe loa | 1600 pā/kekona |
| Ka laina linearity o ke kaomi | < 0.25% |
| Ka mana kaomi hoʻololi | ʻAe i ka hoʻokomo ʻana o ka mana kaomi hoʻololi programmable |
| Ka hoʻokele ʻana o ka paleki | |
| Ua lako ka papa paheʻe me kahi sensor ukana no ke ana ʻana o ka torque, a me ka laulā piha | 5000Nm |
| Pololei o ke ana ʻana | ±0.1% FS |
| |
| Pae ana | 0 ~ 1000℃ |
| Pololei o ke ana ʻana | ± 1% FS |
| ʻAno laina uku | ʻO ka thermocouple ʻano-K |
| Ke kahawai e hoʻohuli ana | Ke komo ʻana ma o ke apo hōʻiliʻili 2 |
| Kanal ʻaʻole e wili ana | Apo 4 |
Nā palena loea hapa