Динамометри болишти тормози мошин - навъи B
Ариза:
Тормоз яке аз ҷузъҳои муҳими рондани бехатари мошин аст ва кори он ба бехатарии ронандагӣ ва кори қувваи мошин таъсири назаррас мерасонад. Одатан, кори тормоз мувофиқи стандартҳои санҷиши муқаррарнамудаи муассисаҳои бонуфуз санҷида мешавад. Усулҳои умумии санҷиш санҷиши намунаҳои хурд ва санҷиши мизи инерсиалиро дар бар мегиранд. Санҷишҳои намунаҳои хурд барои тақлид кардани андозаҳо ва шаклҳои тормоз истифода мешаванд, ки дар натиҷа дақиқии паст, вале арзиши нисбатан паст доранд. Онҳо одатан барои баҳодиҳии маводҳои соиш, назорати сифат ва таҳияи маҳсулоти нав истифода мешаванд.
Динамометри тормоз санҷиши бонуфузтарин дар санҷиши сифати тормоз аст, ки метавонад воқеан хусусиятҳои кории тормозро инъикос кунад ва тадриҷан ба ҷараёни асосии санҷиши сифати тормоз табдил ёфтааст. Он метавонад системаҳои тормозро дар муҳити назоратшавандае, ки ҷаҳони воқеиро инъикос мекунад, санҷад.
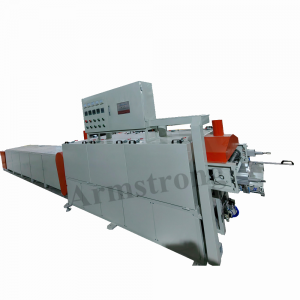
Санҷиши динамометрии тормозҳои автомобилӣ як симулятсияи раванди тормозкунии автомобилҳо мебошад, ки самаранокии тормозкунӣ, устувории гармӣ, фарсудашавии қабат ва мустаҳкамии тормозҳоро тавассути санҷишҳои стендӣ месанҷад. Усули кунунии универсалӣ дар ҷаҳон ин симулятсияи шароити тормозкунии маҷмӯи тормоз бо истифода аз инерсияи механикӣ ё инерсияи электрикӣ мебошад, то кори гуногуни онро санҷад. Ин динамометри навъи тақсимшуда барои санҷиши тормозкунии мошинҳои мусофирбар пешбинӣ шудааст.
Бартариҳо:
1.1 Барои кам кардани таъсири ларзиш ва садои мизбон ба озмоиш, мизбон аз платформаи озмоишӣ ҷудо карда шудааст.
1.2 Чархи маховик бо сатҳи конусии меҳвари асосӣ ҷойгир карда шудааст, ки барои ҷудо кардан ва кори устувор қулай аст.
1.3 Дар миз силиндраи электрикии серво барои рондани силиндраи асосии тормоз истифода мешавад. Система бо дақиқии баланди назорати фишор устувор ва боэътимод кор мекунад.
1.4 Нармафзори мизӣ метавонад стандартҳои гуногуни мавҷударо иҷро кунад ва аз ҷиҳати эргономикӣ дӯстона аст. Истифодабарандагон метавонанд барномаҳои санҷиширо мустақилона тартиб диҳанд. Системаи махсуси санҷиши садо метавонад мустақилона бидуни такя ба барномаи асосӣ кор кунад, ки барои идоракунӣ қулай аст.
1.5 Стандартҳои санҷиши иҷрошаванда: AK-Master, SAE J2522, ECE R90, JASO C406, ISO 26867, санҷиши GB-T34007-2017 ва ғайра.
Тафсилоти маҳсулот


| Параметрҳои асосии техникӣ | |
| Муҳаррики асосӣ | Сохтори тақсимшуда, корпуси асосӣ ва платформаи озмоишӣ ҷудо карда шудаанд |
| Қувваи муҳаррик | 200 кВт (ABB) |
| Навъи муҳаррик | Мотор бо танзими суръати басомади AC, бо ҳавои мустақил хунук карда мешавад |
| Диапазони суръат | 0 - 2000 чархзанӣ дар як дақиқа |
| Диапазони моменти доимӣ | аз 0 то 990 чархзанӣ дар як дақиқа |
| Диапазони қувваи доимӣ | аз 991 то 2000 чархзанӣ дар як дақиқа |
| Дурустии назорати суръат | ± 0.2%FS |
| Дурустии андозагирии суръат | ± 0.1%FS |
| Иқтидори аз ҳад зиёд боркунӣ | 150% |
| Танзимгари суръати муҳаррик | Силсилаи ABB 880, иқтидор: 200 кВт, технологияи беназири идоракунии DTC |
| Системаи инерсия | |
| Инерсияи таҳкурсии мизи озмоишӣ | Тақрибан 10 кг/м2 |
| Ҳадди ақал инерсияи механикӣ | Тақрибан 10 кг/м2 |
| Чархи маховикии инерсияи динамикӣ | 80 кгм2* 2+50кгм2* 1 = 210 кг/м2 |
| Макс. Инерсияи механикӣ | 220 кгм2 |
| Макс. Инерсияи аналогии барқӣ | 40 кгм2 |
| Диапазони инерсияи аналогӣ | 10-260 кгм² |
| Дақиқии назорати аналогӣ | Хатои ҳадди аксар ±1 гм² |
| |
| Фишори максималии тормоз | 20 МПа |
| Суръати максималии афзоиши фишор | 1600 бар/сония |
| Хаттии назорати фишор | <0.25% |
| Назорати фишори динамикӣ | Имкон медиҳад, ки назорати фишори динамикии барномарезишаванда ворид карда шавад |
| Моменти тормозкунӣ | |
| Мизи лағжанда бо сенсори бор барои чен кардани моменти момент ва тамоми диапазон муҷаҳҳаз шудааст | 5000Нм |
| Дақиқии андозагирӣ | ±0.1% FS |
| |
| Диапазони ченкунӣ | 0 ~ 1000℃ |
| Дақиқии андозагирӣ | ± 1% FS |
| Навъи хатти ҷуброн | Термопараи навъи K |
| Канали гардишкунанда | Гузариш аз ҳалқаи коллектор 2 |
| Канали ғайригардишкунанда | Ҳалқаи 4 |
Параметрҳои техникии қисман