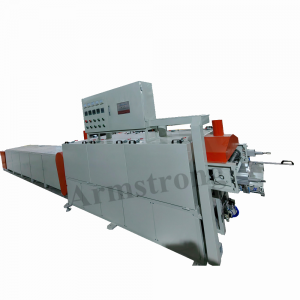
ကားဘရိတ်ပြား ဒိုင်းနမိုမီတာ - အမျိုးအစား B
လျှောက်လွှာ:
ဘရိတ်သည် ကားတစ်စီး ဘေးကင်းစွာမောင်းနှင်ရန်အတွက် အရေးကြီးသော အစိတ်အပိုင်းများထဲမှ တစ်ခုဖြစ်ပြီး ၎င်း၏စွမ်းဆောင်ရည်သည် မောင်းနှင်မှုဘေးကင်းရေးနှင့် ကား၏ ပါဝါစွမ်းဆောင်ရည်အပေါ် သိသာထင်ရှားသော သက်ရောက်မှုရှိသည်။ ပုံမှန်အားဖြင့် ဘရိတ်စွမ်းဆောင်ရည်ကို အာဏာပိုင်အဖွဲ့အစည်းများမှ သတ်မှတ်ထားသော စမ်းသပ်စံနှုန်းများနှင့်အညီ စမ်းသပ်သည်။ အထွေထွေစမ်းသပ်နည်းလမ်းများတွင် နမူနာငယ်စမ်းသပ်မှုနှင့် inertial bench စမ်းသပ်ခြင်းတို့ ပါဝင်သည်။ နမူနာငယ်စမ်းသပ်မှုများကို ဘရိတ်အတိုင်းအတာနှင့် ပုံသဏ္ဍာန်များကို တုပရန် အသုံးပြုသောကြောင့် တိကျမှုနည်းပါးသော်လည်း ကုန်ကျစရိတ်နည်းပါးသည်။ ၎င်းတို့ကို ပွတ်တိုက်မှုပစ္စည်းများကို အဆင့်သတ်မှတ်ခြင်း၊ အရည်အသွေးထိန်းချုပ်မှုနှင့် ထုတ်ကုန်အသစ်များ တီထွင်ထုတ်လုပ်ရန်အတွက် အများအားဖြင့် အသုံးပြုကြသည်။
ဘရိတ်ဒိုင်နမိုမီတာသည် ဘရိတ်အရည်အသွေးစစ်ဆေးခြင်းတွင် အစွမ်းထက်ဆုံးစမ်းသပ်မှုဖြစ်ပြီး ဘရိတ်၏အလုပ်လုပ်ပုံလက္ခဏာများကို အမှန်တကယ်ထင်ဟပ်စေပြီး တဖြည်းဖြည်းနှင့် ဘရိတ်အရည်အသွေးစစ်ဆေးခြင်း၏ အဓိကအချက်ဖြစ်လာခဲ့သည်။ ၎င်းသည် လက်တွေ့ကမ္ဘာကို ထင်ဟပ်စေသော ထိန်းချုပ်ထားသောပတ်ဝန်းကျင်တွင် ဘရိတ်စနစ်များကို စမ်းသပ်နိုင်သည်။
မော်တော်ကားဘရိတ်များ၏ ဒိုင်နမိုမီတာစမ်းသပ်မှုသည် မော်တော်ကားများ၏ ဘရိတ်လုပ်ငန်းစဉ်ကို သရုပ်ဖော်ခြင်းဖြစ်ပြီး၊ ဘရိတ်စွမ်းဆောင်ရည်၊ အပူချိန်တည်ငြိမ်မှု၊ အတွင်းအလွှာပွန်းပဲ့မှုနှင့် ဘရိတ်ခိုင်ခံ့မှုကို bench စမ်းသပ်မှုများမှတစ်ဆင့် စမ်းသပ်သည်။ ကမ္ဘာပေါ်တွင် လက်ရှိ တစ်ကမ္ဘာလုံးဆိုင်ရာနည်းလမ်းမှာ ၎င်း၏အမျိုးမျိုးသောစွမ်းဆောင်ရည်ကို စမ်းသပ်ရန်အတွက် စက်ပိုင်းဆိုင်ရာ အရှိန်အဟုန် သို့မဟုတ် လျှပ်စစ်အရှိန်အဟုန်ကို အသုံးပြု၍ ဘရိတ်တပ်ဆင်မှု၏ ဘရိတ်အခြေအနေများကို သရုပ်ဖော်ရန်ဖြစ်သည်။ ဤ split type dynamometer ကို ခရီးသည်တင်ကားများ၏ ဘရိတ်စမ်းသပ်မှုအတွက် ဒီဇိုင်းထုတ်ထားသည်။
အားသာချက်များ:
၁.၁ စမ်းသပ်မှုအပေါ် host တုန်ခါမှုနှင့် ဆူညံသံ၏ သက်ရောက်မှုကို အနည်းဆုံးဖြစ်စေရန် host ကို စမ်းသပ်ပလက်ဖောင်းမှ ခွဲထားသည်။
၁.၂ ဖလိုင်းဝှီးလ်ကို အဓိကဝင်ရိုး၏ ကွန်ကရစ်မျက်နှာပြင်နှင့် တပ်ဆင်ထားသောကြောင့် ဖြုတ်တပ်ရန်နှင့် တည်ငြိမ်စွာလည်ပတ်ရန်အတွက် အဆင်ပြေပါသည်။
၁.၃ ဘရိတ်မာစတာဆလင်ဒါကို မောင်းနှင်ရန် servo လျှပ်စစ်ဆလင်ဒါကို အသုံးပြုထားသည်။ စနစ်သည် မြင့်မားသောဖိအားထိန်းချုပ်မှုတိကျမှုဖြင့် တည်ငြိမ်စွာနှင့် ယုံကြည်စိတ်ချစွာလည်ပတ်သည်။
၁.၄ bench software သည် ရှိပြီးသား စံနှုန်းအမျိုးမျိုးကို လုပ်ဆောင်နိုင်ပြီး ergonomic နှင့် လိုက်လျောညီထွေရှိသည်။ အသုံးပြုသူများသည် စမ်းသပ်ပရိုဂရမ်များကို ၎င်းတို့ကိုယ်တိုင် စုစည်းနိုင်သည်။ အထူးဆူညံသံစမ်းသပ်စနစ်သည် အဓိကပရိုဂရမ်ကို မှီခိုစရာမလိုဘဲ သီးခြားစီလည်ပတ်နိုင်ပြီး စီမံခန့်ခွဲမှုအတွက် အဆင်ပြေသည်။
၁.၅ အကောင်အထည်ဖော်နိုင်သော စမ်းသပ်မှုစံနှုန်းများ- AK-Master၊ SAE J2522၊ ECE R90၊ JASO C406၊ ISO 26867၊ GB-T34007-2017 စမ်းသပ်မှု စသည်တို့။
ထုတ်ကုန်အသေးစိတ်


| အဓိက နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ | |
| အဓိကအင်ဂျင် | ပိုင်းခြားထားသောဖွဲ့စည်းပုံ၊ အဓိကကိုယ်ထည်နှင့် စမ်းသပ်ပလက်ဖောင်းကို ခွဲထားသည် |
| မော်တာပါဝါ | ၂၀၀ ကီလိုဝပ် (ABB) |
| မော်တာအမျိုးအစား | AC ကြိမ်နှုန်း ထိန်းညှိမော်တာ၊ သီးခြားလေအေးပေးစနစ် |
| မြန်နှုန်းအပိုင်းအခြား | ၀ - ၂၀၀၀ rpm |
| စဉ်ဆက်မပြတ် torque အကွာအဝေး | ၀ မှ ၉၉၀ rpm အထိ |
| စဉ်ဆက်မပြတ် ပါဝါအကွာအဝေး | ၉၉၁ မှ ၂၀၀၀ rpm အထိ |
| မြန်နှုန်းထိန်းချုပ်မှုတိကျမှု | ± 0.2%FS |
| မြန်နှုန်းတိုင်းတာမှု တိကျမှု | ± 0.1%FS |
| ဝန်ပိုတင်နိုင်စွမ်း | ၁၅၀% |
| မော်တာအမြန်နှုန်းထိန်းချုပ်ကိရိယာ | ABB 880 စီးရီး၊ ပါဝါ- 200KW၊ ထူးခြားသော DTC ထိန်းချုပ်မှုနည်းပညာ |
| အရှိန်အဟုန်စနစ် | |
| စမ်းသပ်ခုံ အခြေခံ အရှိန်အဟုန် | ၁၀ ကီလိုဂရမ်ခန့်2 |
| အနည်းဆုံး စက်ပိုင်းဆိုင်ရာ အရှိန်အဟုန် | ၁၀ ကီလိုဂရမ်ခန့်2 |
| ဒိုင်းနမစ် အရှိန်အဟုန်ဖြင့် ဖလိုင်းဝှီးလ် | ၈၀ ကီလိုမီတာ2* ၂+၅၀ ကီလိုဂရမ်/မီတာ2* ၁ = ၂၁၀ ကီလိုဂရမ်မီတာ2 |
| အများဆုံး စက်ပိုင်းဆိုင်ရာ အရှိန်အဟုန် | ၂၂၀ ကီလိုမီတာ2 |
| အများဆုံး လျှပ်စစ် အန်နာလော့ အရှိန်အဟုန် | ၄၀ ကီလိုမီတာ2 |
| အန်နာလော့ အရှိန်အဟုန် အကွာအဝေး | ၁၀-၂၆၀ ကီလိုမီတာစတုရန်း |
| အန်နာလော့ ထိန်းချုပ်မှု တိကျမှု | အများဆုံးအမှား ±1gm² |
| |
| အများဆုံးဘရိတ်ဖိအား | ၂၀ အမ်ပီယာ |
| အမြင့်ဆုံးဖိအားမြင့်တက်နှုန်း | ၁၆၀၀ ဘား/စက္ကန့် |
| ဖိအားထိန်းချုပ်မှု linearity | < ၀.၂၅% |
| ဒိုင်းနမစ်ဖိအားထိန်းချုပ်မှု | ပရိုဂရမ်ရေးသားနိုင်သော ဒိုင်းနမစ်ဖိအားထိန်းချုပ်မှု၏ ထည့်သွင်းမှုကို ခွင့်ပြုသည် |
| ဘရိတ်အုပ်အား | |
| လျှောစားပွဲတွင် torque တိုင်းတာရန်အတွက် load sensor တပ်ဆင်ထားပြီး အကွာအဝေးအပြည့်အစုံကို တပ်ဆင်ထားသည်။ | ၅၀၀၀ နွန်မီတာ |
| တိုင်းတာမှုတိကျမှု | ±0.1% FS |
| |
| တိုင်းတာမှုအကွာအဝေး | ၀ ~ ၁၀၀၀ ℃ |
| တိုင်းတာမှုတိကျမှု | ± ၁% FS |
| လျော်ကြေးပေးရေးလိုင်းအမျိုးအစား | K-type သာမိုကာပယ် |
| လည်ပတ်နေသော ချန်နယ် | စုဆောင်းသူလက်စွပ် ၂ မှတစ်ဆင့် ဖြတ်သန်းသွားခြင်း |
| လည်ပတ်မှုမရှိသော ချန်နယ် | လက်စွပ် ၄ |
တစ်စိတ်တစ်ပိုင်းနည်းပညာဆိုင်ရာ parameters များ